 |
MeteoIODoc 20260616.90c51eec
Environmental timeseries pre-processing
|
|
MeteoIODoc 20260616.90c51eec
Environmental timeseries pre-processing
|
A Monte Carlo sampling method: the particle filter.
Introduction
The particle filter : Overview, Algorithm, Example: Mockup snow model, Example: Literature model function, Example: Gridded solar model input
Other features : Resampling, Final state estimation, Online state tracking, Seeding the random number generators
List of ini keys, Roadmap
Bibliography
Disclaimer: These particle and Kalman filters are not meant for operational use, rather they aim to be an accessible framework to scientific research backed by the convenience of MeteoIO, to quickly try a few things.
This program implements a particle filter, also called a sequential Monte Carlo filter. Briefly, a particle filter propagates a state in state space by drawing from a proposed importance density and weights these particles according to the likelihood that the system is in a certain state taking into account noisy (!) measurements via Bayesian statistics.
Implemented is a SIR (Sampling Importance Resampling) algorithm, which is derived from the SIS (Sequential Importance Sampling) algorithm by
(For a SIS algorithm, we would not use the prior pdf as importance density q, but rather choose one that is specific to the model. Then, the update formula for the weights becomes a little more complex, but the work is in actually choosing q. Such filters may be more robust against outliers.)
It operates in two stages: prediction and update based on new measurements coming in by applying a recursive Bayesian filter. This can be done online, which means that any new measurement can be augmented without having to recalculate the past. Although these are Monte Carlo simulations, they form a rigorous framework for state dynamics. With a large enough number of particles, the filter approximates the optimal solution to the problem of estimating the most likely state of a system taking into account all available information.
Physically speaking, we generate mass-energy-points (which, in our favor, can't change too rapidly due to their inertia) and place them in the state space. Mathematically, this is represented by delta-functions that are scaled by the prior probability density and summing over them yields the probability p, or rather, an approximation thereof. These particles are assigned a weight that is essentially (derived from) the Bayesian statistics formula \(P(A|B) = P(B|A) * P(A) / P(B)\) expressing a degree of belief in the estimated state.
Contrary to a Kalman filter (FilterKalman), a particle filter is able to emulate truly nonlinear model functions as well as arbitrary probability density functions.
The syntax follows Ref. [AM+02] and all remarks here can be investigated further therein.
INPUT:
Two models are required:
OUTPUT:
The particle filter needs a model function that describes the evolution of the states, and its starting values. Alternatively, you can pick a meteo parameter from your dataset that a curve is fitted against. You also need an analytical observation model to relate the measured observables to the internal states of the model function. If the model describes the measured parameter directly, then \(obx(x) = x\). Finally, the distributions for the model noise, observation noise, and prior distribution (for \(x_0\)) must be configured.
This implementation propagates a single state only, but you can obviously run the filter on each meteo parameter separately and you can also use every meteo parameter in the model. However, there is no way to update more than one state in the model equation itself (i. e. no vector maths).
The following algorithm is implemented (algorithm 4 of Ref. [AM+02]):
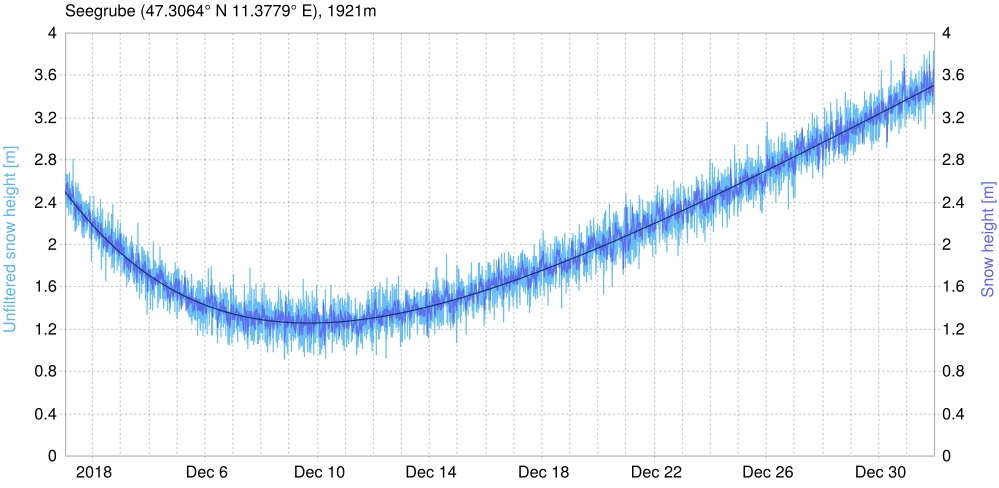
N particles at \(T=0\) compute the model function.T.* PARTICLE FILTER * and * KALMAN FILTER * and shouldn't be too hard to read.Let's work through another example. Once more we fake an observation so we know the true process. If some snow melts in the first half of the month before it starts to snow again we could describe this with:
\[ x_k = x_{k-1} * a + b * u \]
With a and b being simple scalars and u being a factor that depends on the time step k. The program in /doc/examples/statistical_filters.cc will calculate this function for some preset \(x_0\), add system and observation noise to it, and write the simulated measurements to a file, as well as u. Within MeteoIO, we act as if this was a real measurement.
We enter the system model with the SYSTEM_MODEL key. The control signal u from above is saved into the meteo data as CTRL, so when MeteoIO runs it has it available as this parameter. The observation model is simply \(obs(x) = x\) again (cf. identity matrix in sensor fusion example) and we assume 2.5 m snow initially:
T=0 for the observation model. tt is a normalized and shifted version of the date such that the time of the first measurement is at 0 and the second one is at 1. Suppose you had measurements at 00:00, 01:00, and 01:30 then kk would be [0, 1, 2] and tt would be [0, 1, 1.5].At last, we set up our random number generators:
PRIOR_RNG_DISTRIBUTION and PRIOR_RNG_PARAMETERS we can omit these keys and the prior distribution will be chosen to be the model distribution. Same would be true for the observation distribution, but that one is slightly different here. Together, our ini file looks like this:

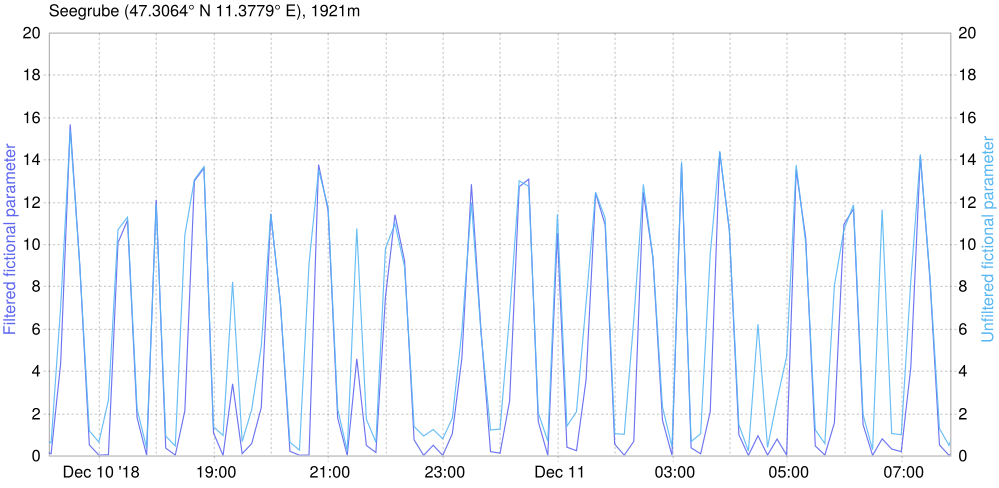
The following example function has nothing to do with meteo data, but it has been analyzed a lot in literature (e. g. in Ref. [AM+02] and Ref. [CPS92]) and it's nonlinear.
We change the functions and RNG parameters in the control program statistical_filters.cc:
Of course, we have to adapt our ini settings accordingly:
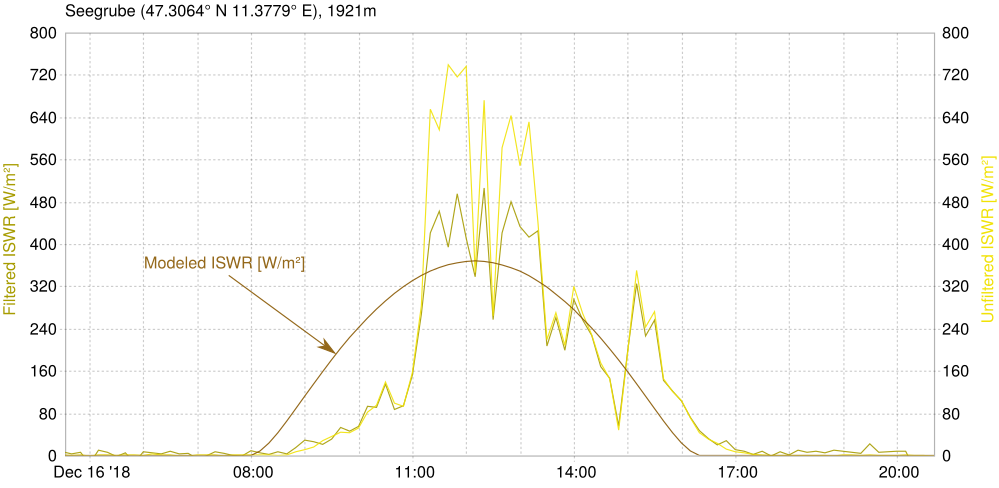
For a particle filter, as well as for a Kalman filter, you absolutely need a model function. However, often you will only have data points that your or somebody else's model spits out. For this reason the particle filter allows you to fit a curve against the data points and use that as model function. The following fits are available: Fit1D, and the polynomial fit takes a 2nd argument with the degree of interpolation (default: 3).
Let's use a MeteoIO internal model for the global radiation:
Comparing the values created this way with the measurements we can see that there is up to a couple of hundret W/m^2 difference between the two. This gap needs to be covered by the standard deviations of the random number generators. If you put small numbers here then the huge difference will be so unlikely that everything is filtered (as it should, because obviously it is not justified to put complete trust in this model). For example, if we say that the standard deviation for the measurement sensor is 30, and some of the discrepancy remaining is covered by a standard deviation of 100 in the model then the highest peaks are still deemed unlikely while the rest stays pretty much the same.
Using a little more particles our ini section reads:
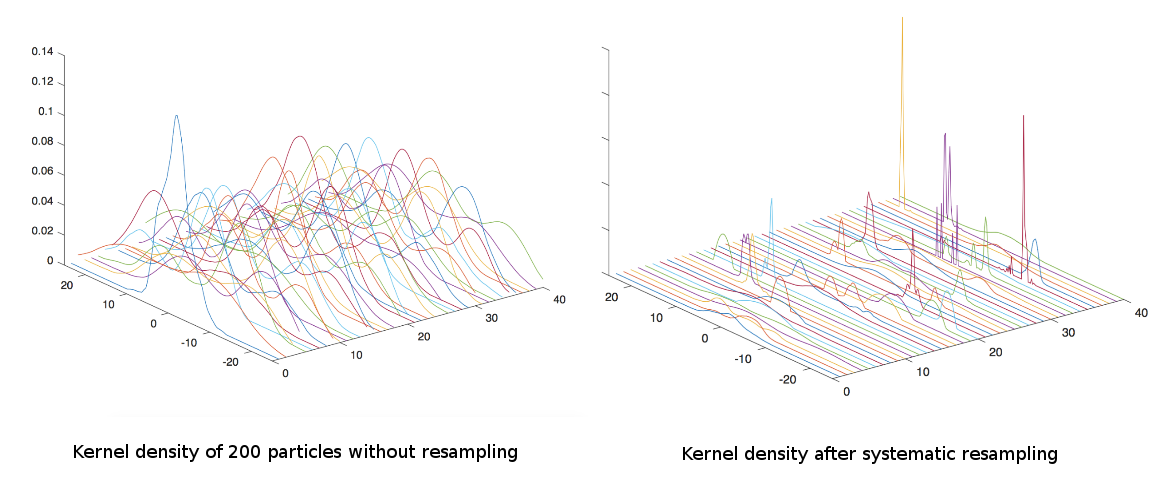
Resampling of the particle paths is turned on and off with the PATH_RESAMPLING key. If resampling is turned off then a lot of computational power may be devoted to particles with low weights that do not contribute significantly to the end result, and the paths may lose track of the main line. Usually, it is needed.
The RESAMPLE_PERCENTILE \(r_p\) lets you pick a factor to decide whether to resample: if \(N_{eff} < r_p * N\) then resample, where N is the number of particles and \(N_{eff}\) the effective sample size, [AM+02] Eq. 50. Strictly, a SIR algorithm requires resampling at each time step, but in practice a heuristic like this is appropriate (e. g. Ref. [DJ09]).
For now, only one resampling strategy is implemented:
SYSTEMATIC: Straight-forward systematic resampling. This helps avoid degeneracy by skipping particles with small weights in favor of more meaningful ones (algorithm 2 of Ref. [AM+02]). However, it does decrease diversity (by selecting particles with high weight multiple times) and for very small process noise the particles collapse to a single point within a couple of iterations ("sample impoverishment").
/doc/examples/statistical_filters.cc program.In the end, the particle filter will estimate the most likely observation by taking the mean of all particles (sum of particles multiplied with their weight) and use that as input for the observation model. This is only one possible measure however and a second one is offered: at each time step, the particle with the highest weight is the observation model input:
The basics are there to aggregate new information online, i. e. to keep the state of the filter and simply apply any number of new measurements to it without recalculating the past. Although it may make sense to formulate models that take into account earlier time steps, often the added complexity outweighs the benefits. Hence, if each time step is calculated from only the previous state then it is enough to save the last state (particles and their weights) and resume from there.
If the input file is not found the filter will silently start with the initial states that are set through the ini file. In the example above the filter will not find an input file for the first run and thus use the initial states. In the end it writes the states to a file. The next time the filter is started the input file will exist and the calculation is resumed at this point. However, as of yet the model parameters (like kk, tt, ...) are not saved and that has to be taken into account for the analytical model output. If this would be needed / wanted, it will be built in. Be aware though that Ref. [DJ09] mentions that the number of time steps should not be too high per run.
You can also output the particles' paths as a big matrix:
You can seed all random number generators for reproducibility. To do this, set the appropriate keys as follows:
| Keyword | Meaning | Optional | Default Value |
|---|---|---|---|
| MODEL_FUNCTION | State transition function. | no, but can also be a fit | empty |
| MODEL_FIT_PARAM | Parameter in meteo set to fit model curve against. | yes, if MODEL_FUNCTION is set | empty |
| INITIAL_STATE | State variable at T=0. | yes | 1st observation |
| OBS_MODEL_FUNCTION | Model relating the observations to the states. | yes, but you need one | "xx" |
| ESTIMATION_MEASURE | Which measure to use for the final estimation. | yes | MEAN (choices: MAX_WEIGHT) |
| NO_OF_PARTICLES | Number of particles per time step. | yes | 500 |
| PATH_RESAMPLING | Perform particle path resampling? | yes | TRUE, this is normally needed |
| RESAMPLE_PERCENTILE | Scalar for simple resampling heuristic. | yes | 0.5 |
| DUMP_PARTICLES_FILE | Output file path for the particles. | yes | empty |
| DUMP_INTERNAL_STATES_FILE | Output file path for the internal states. | yes | empty |
| INPUT_INTERNAL_STATES_FILE | Input file path for the internal states. | yes | empty |
| VERBOSE | Output warnings to the console. | yes | TRUE, warnings should be mitigated |
| MODEL_RNG_ALGORITHM | Random numbers generator function for the model. | yes | XOR |
| MODEL_RNG_DISTRIBUTION | Random numbers distribution for the model. | yes | GAUSS |
| MODEL_RNG_PARAMETERS | Random numbers distribution parameters for the model. | yes, but the filter is sensitive to them | RNG defaults |
| MODEL_RNG_SEED | Random numbers generator seed for the model. | yes | hardware seed |
| PRIOR_RNG_ALGORITHM | Random numbers generator function for the prior distribution. | yes | XOR |
| PRIOR_RNG_DISTRIBUTION | Random numbers distribution for the prior. | yes | GAUSS |
| PRIOR_RNG_PARAMETERS | Random numbers distribution parameters for the prior. | yes | RNG defaults |
| PRIOR_RNG_SEED | Random numbers generator seed for the prior. | yes | hardware seed |
| OBS_RNG_ALGORITHM | Random numbers generator function for the observations. | yes | XOR |
| OBS_RNG_DISTRIBUTION | Random numbers distribution for the observations. | yes | GAUSS |
| OBS_RNG_PARAMETERS | Random numbers distribution parameters for the observations. | yes | RNG defaults |
| OBS_RNG_SEED | Random numbers generator seed for the observations. | yes | hardware seed |
| RESAMPLE_RNG_SEED | Random numbers generator seed for the resampling. | yes | hardware seed |
An interesting development would be to slowly follow Ref. [MG+14] to reach similar results, but generalized to arbitrary data and terrain. For this, spatially correlated random numbers are necessary and we would move towards gridded filters and spatial interpolations.
See Ref. [DJ09] for smoothing algorithms of this class that would run through the data forwards and backwards and have knowledge of all measurements, i. e. no live filtering.
#include <FilterParticle.h>
Public Member Functions | |
| FilterParticle (const std::vector< std::pair< std::string, std::string > > &vecArgs, const std::string &name, const Config &cfg) | |
| virtual void | process (const unsigned int ¶m, const std::vector< MeteoData > &ivec, std::vector< MeteoData > &ovec) override |
| The filtering routine as called by the processing toolchain. | |
 Public Member Functions inherited from mio::ProcessingBlock Public Member Functions inherited from mio::ProcessingBlock | |
| virtual | ~ProcessingBlock () |
| virtual void | process (Date &dateStart, Date &dateEnd) |
| std::string | getName () const |
| const ProcessingProperties & | getProperties () const |
| const std::string | toString () const |
| bool | skipStation (const std::string &station_id) const |
| Should the provided station be skipped in the processing? | |
| bool | noStationsRestrictions () const |
| const std::vector< DateRange > | getTimeRestrictions () const |
| bool | skipHeight (const double &height) const |
| Should the provided height be skipped in the processing? | |
Additional Inherited Members | |
| Static Public Member Functions inherited from mio::ProcessingBlock | |
| static void | readCorrections (const std::string &filter, const std::string &filename, std::vector< double > &X, std::vector< double > &Y) |
| Read a data file structured as X Y value on each lines. | |
| static void | readCorrections (const std::string &filter, const std::string &filename, std::vector< double > &X, std::vector< double > &Y1, std::vector< double > &Y2) |
| Read a data file structured as X Y1 Y2 value on each lines. | |
| static std::vector< double > | readCorrections (const std::string &filter, const std::string &filename, const size_t &col_idx, const char &c_type, const double &init) |
| Read a correction file applicable to repeating time period. | |
| static std::vector< offset_spec > | readCorrections (const std::string &filter, const std::string &filename, const double &TZ, const size_t &col_idx=2) |
| Read a correction file, ie a file structured as timestamps followed by values on each lines. | |
| static std::map< std::string, std::vector< DateRange > > | readDates (const std::string &filter, const std::string &filename, const double &TZ) |
| Read a list of date ranges by stationIDs from a file. | |
| Static Public Attributes inherited from mio::ProcessingBlock | |
| static const double | default_height |
| Protected Member Functions inherited from mio::ProcessingBlock | |
| ProcessingBlock (const std::vector< std::pair< std::string, std::string > > &vecArgs, const std::string &name, const Config &cfg) | |
| protected constructor only to be called by children | |
| Static Protected Member Functions inherited from mio::ProcessingBlock | |
| static void | extract_dbl_vector (const unsigned int ¶m, const std::vector< MeteoData > &ivec, std::vector< double > &ovec) |
| static void | extract_dbl_vector (const unsigned int ¶m, const std::vector< const MeteoData * > &ivec, std::vector< double > &ovec) |
| Protected Attributes inherited from mio::ProcessingBlock | |
| const std::set< std::string > | excluded_stations |
| const std::set< std::string > | kept_stations |
| const std::vector< DateRange > | time_restrictions |
| std::set< double > | included_heights |
| std::set< double > | excluded_heights |
| bool | all_heights |
| ProcessingProperties | properties |
| const std::string | block_name |
| mio::FilterParticle::FilterParticle | ( | const std::vector< std::pair< std::string, std::string > > & | vecArgs, |
| const std::string & | name, | ||
| const Config & | cfg | ||
| ) |
|
overridevirtual |
The filtering routine as called by the processing toolchain.
| [in] | param | Parameter index the filter is asked to run on by the user. |
| [in] | ivec | Meteo data to filter. |
| [out] | ovec | Filtered meteo data. Cf. main documentation. |
Implements mio::ProcessingBlock.